Description
- This is a Configurable – Programmable Mecanum Wheel Vectoring Robot robot kit with selectable options at the bottom of the page.
- The options are pre-selected to reflect our recommended configuration but can be changed to suit your needs.
- This mecanum wheel Arduino robot platform is designed and fabricated in North Carolina USA.
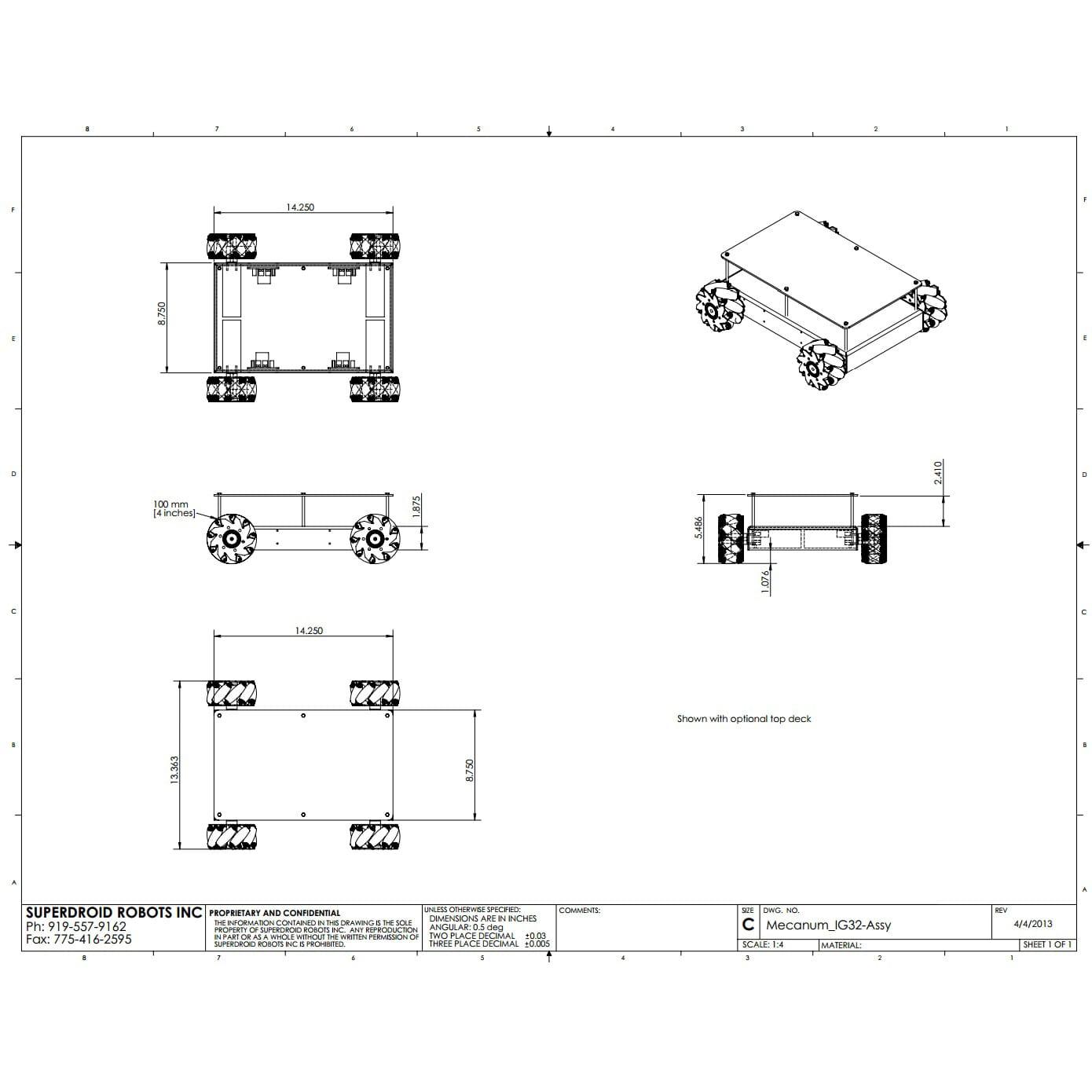
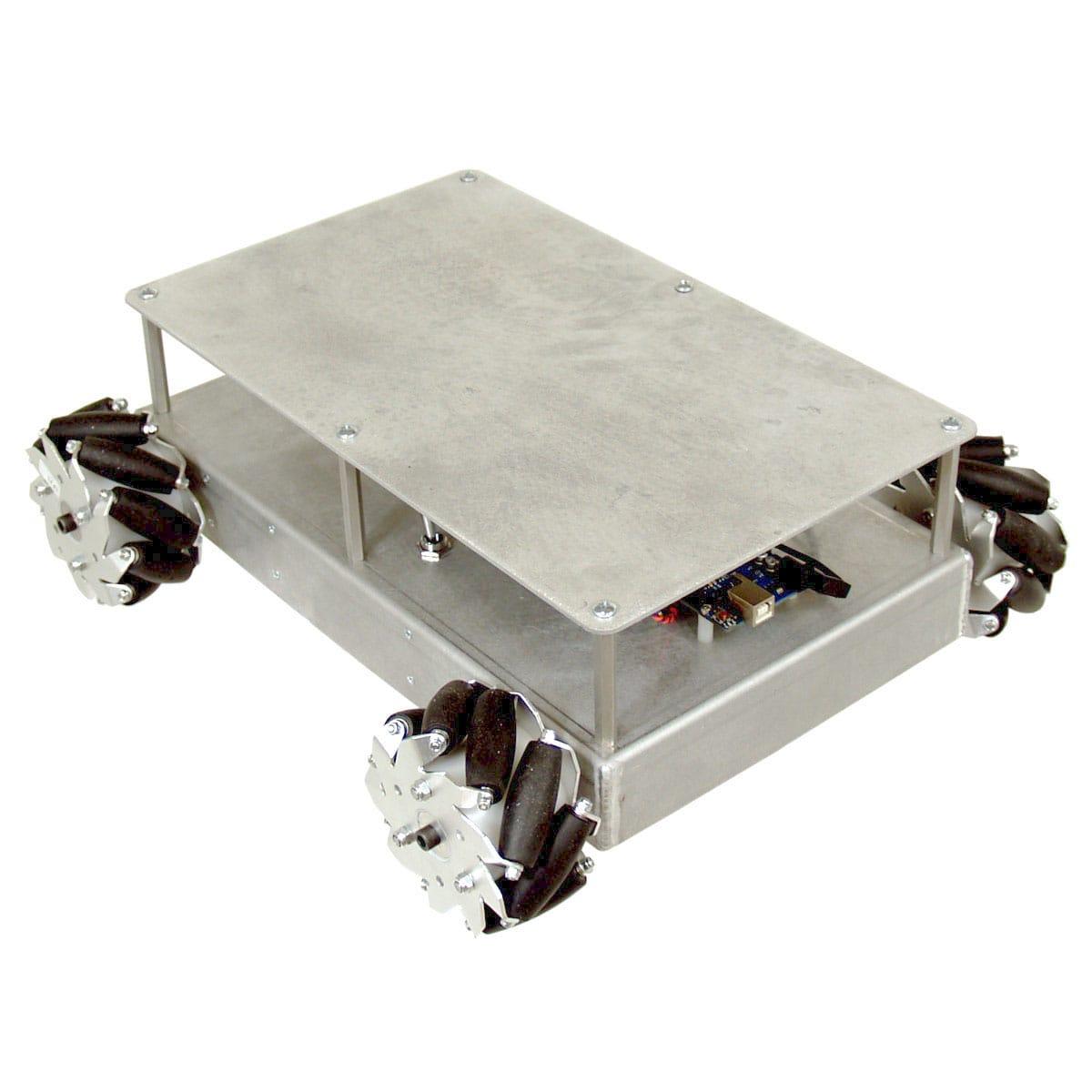
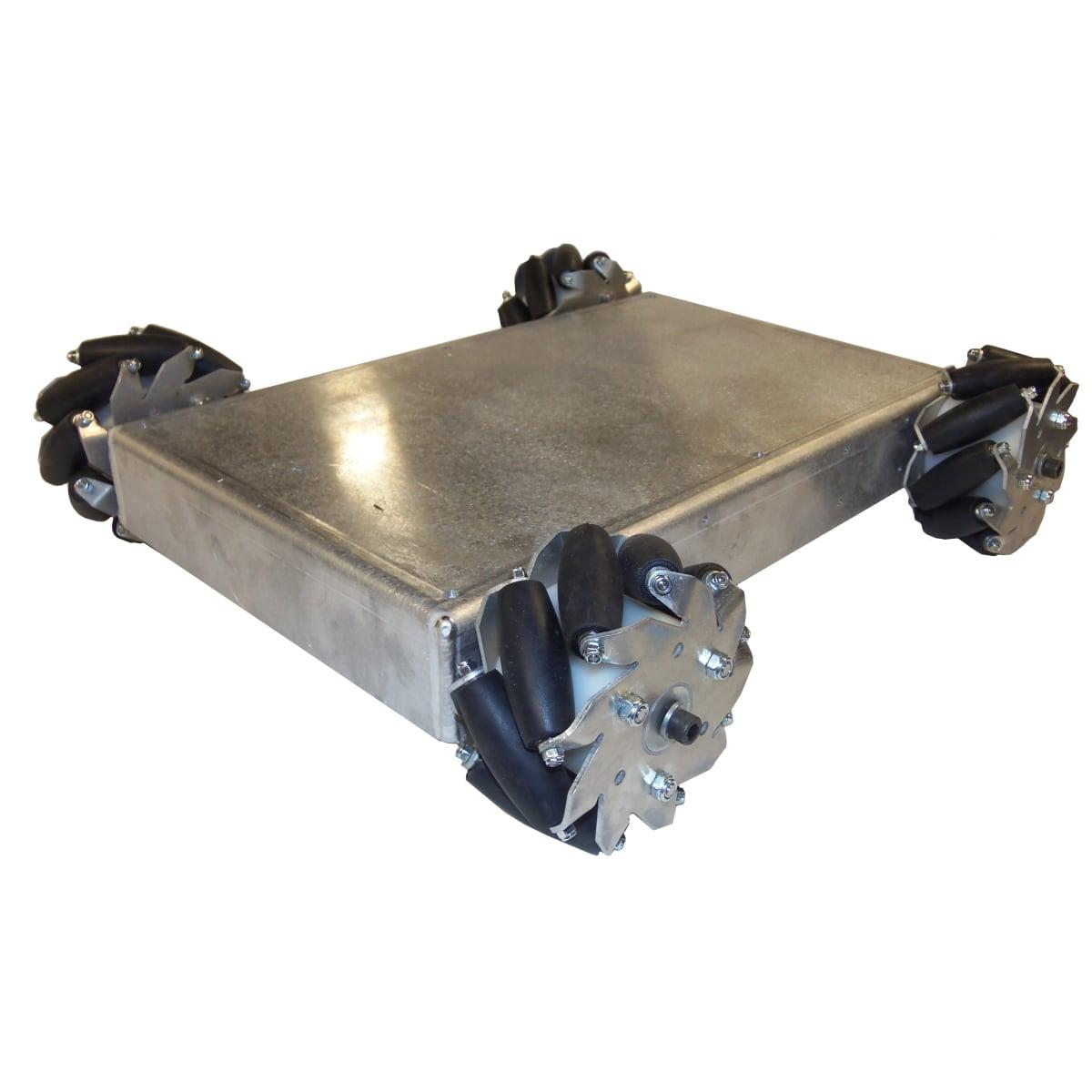
- This Configurable – Programmable Mecanum Wheel Vectoring Robot kit includes the CNC cut 4WD base intended for our IG32 gear motors and Nexus Mecanum wheels or omnidirectional wheels.
- The chassis is cut on our CNC plasma table and bent on our CNC break press.
- It’s made of 3/32″ thick Aluminum.
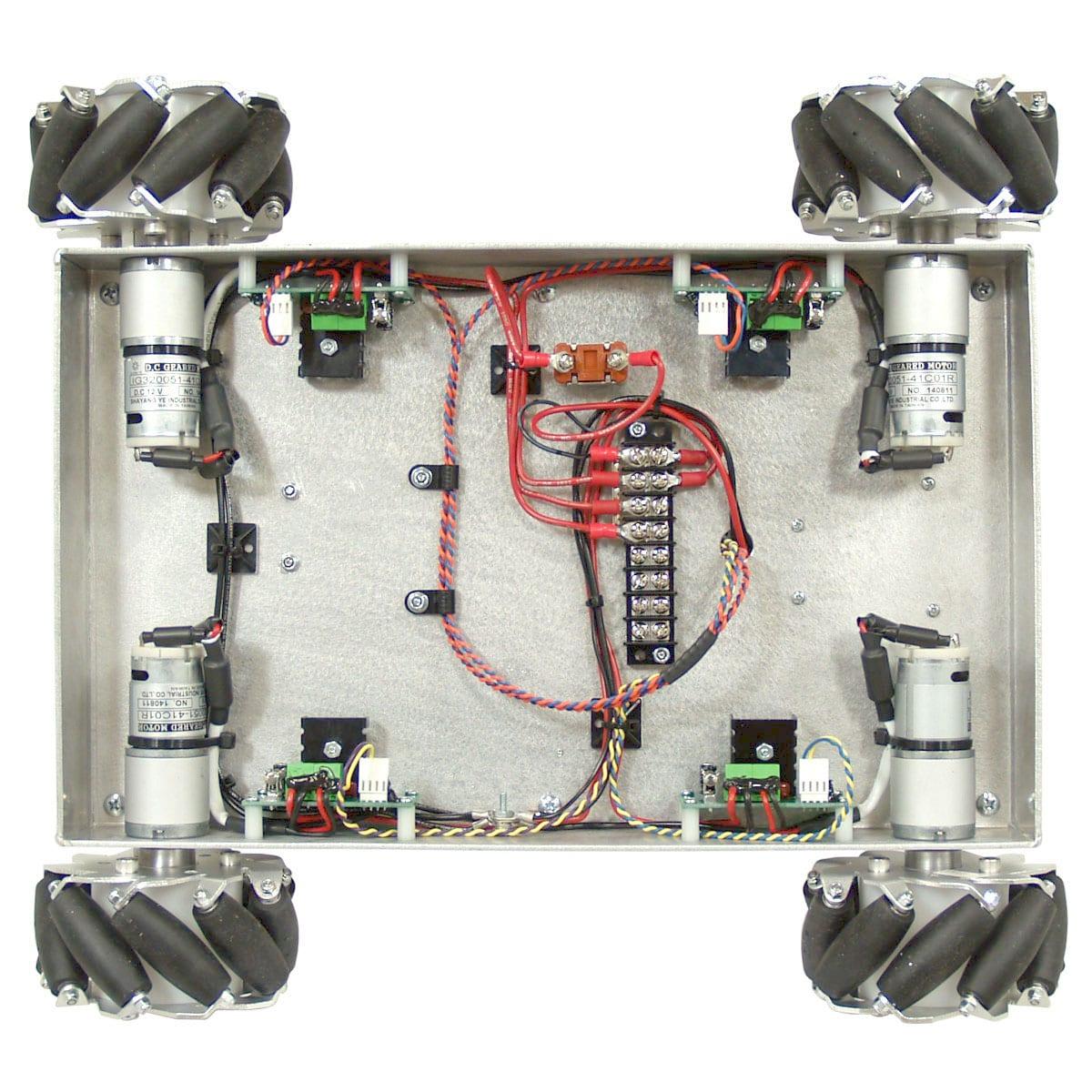
- The chassis also has mounting holes for four PWM motor controllers.
- It is designed so all our planetary IG32 and IG32P gear motors with or without encoders.
- It is NOT intended for our right angle IG32 gear motors.
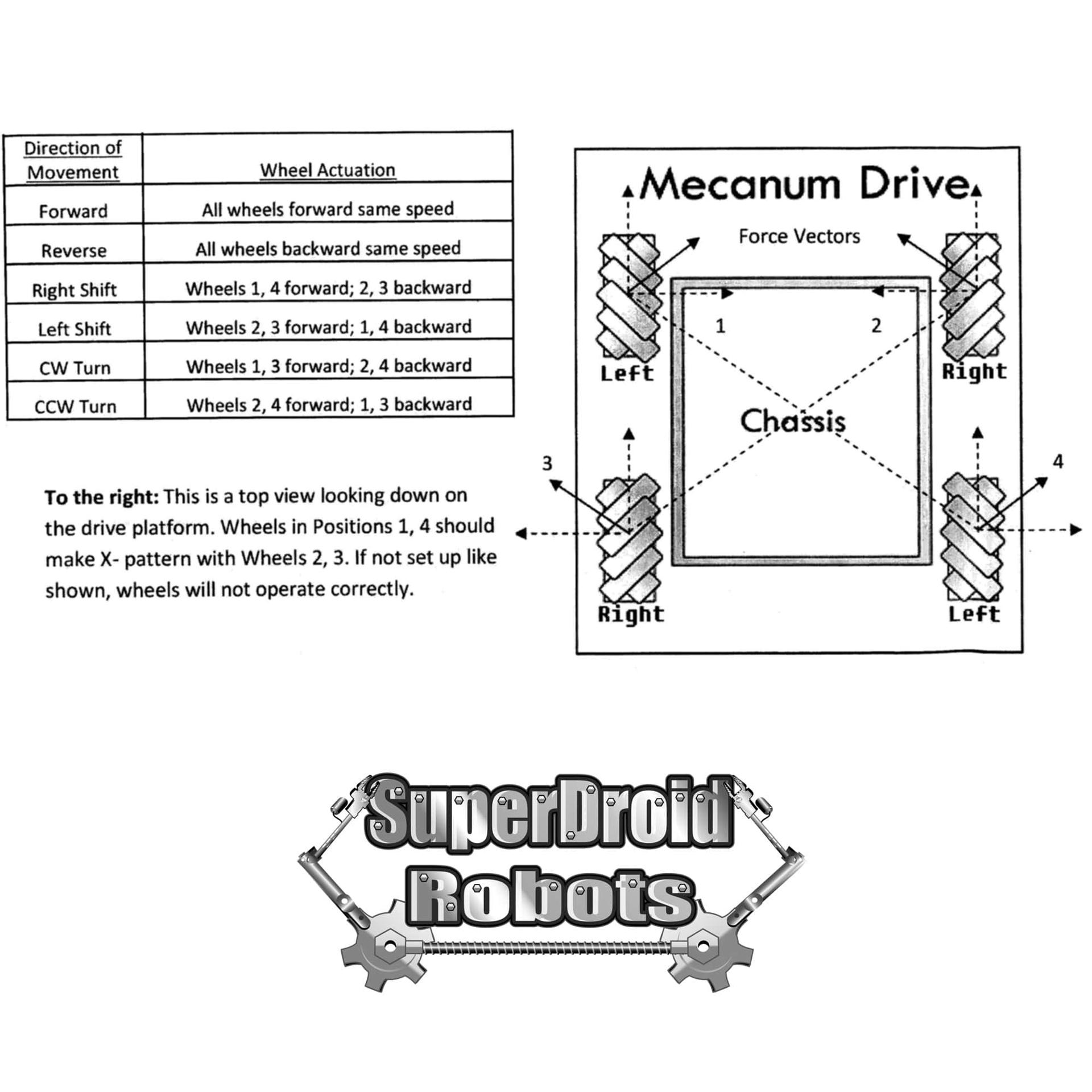
- This robot platform is specifically designed for direct driving with Nexus omni or Mecanum wheels and hubs (listed in the options below).
- See our vectoring robot page for more details.
- If you need this robot customized beyond the provided options below, send us your requirements.
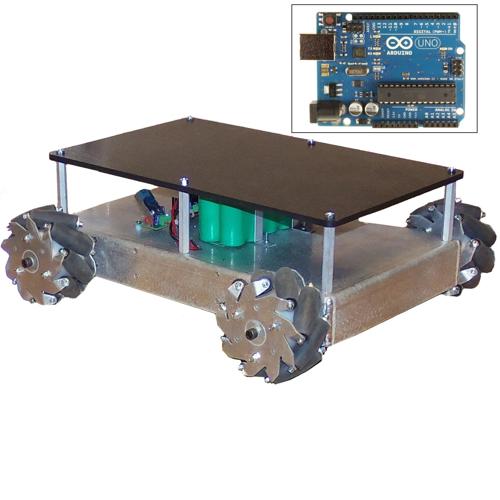
- This is a programmable robot that uses an Arduino microcontroller, enabling you to develop an autonomous robot.
- This Configurable – Programmable Mecanum Wheel Vectoring Robot comes with example code so you’re able to run the robot once assembled.
- Another option we offer is an RC controller to be able to drive this robot manually.
- If you select one of the RC controllers, download the Arduino code for RC override from the GitHub.
- You can also select for us to assemble it in the options below.
- If the assembly option is selected we will assemble, wire, program, and test the robot. It will come ready to run out right of the box.















Reviews
There are no reviews yet.